图示结构两杆长均为d,EI=常数。则A点的水平位移为()A.(←)pd³/2B.Pd3/3EI(→)C.Pd3/3EI(←)D.Pd3/6EI(→)
图示结构两杆长均为d,EI=常数。则A点的垂直位移为()A.qd3/2EI(↑)B.qd3/3EI(↓)C.qd4/4EI(↓)D.qd4/6EI(↓)
图示结构,EI=常数,则结点B的角位移为( )。A.0B.ql3/(24EI)(顺时针)C.7ql3/(96EI)(顺时针)D.3ql3/(24EI)(顺时针)
图所示结构各杆温度均升高t℃,且已知EI和EA均为常数,线膨胀系数为α,则点D的竖向位移△Dn为( )。 A、-αta B、αta C、0 D、2αta
图示结构,EI=常数,截面高h=常数,线膨胀系数为a,外侧环境温度降低t°C,内测环境温度升高t°C,引起的C点竖向位移大小为:
图示连续梁,EI=常数,已知支承B处梁截面转角为-7Pl2/240EI(逆时针向),则支承C处梁截面转角φC应为:
已知图示结构EI=常数,A、B两点的相对水平线位移为:
如图所示的位移法基本体系中(图中结点B处的竖向刚性支杆为基本体系中的附加支杆),基本结构的刚度系数k11之值为( )。
图示刚架,EI为常数,结点A的转角是( )。(提示:利用对称性和转动刚度的概念)
图示结构,EI=常数,截面高h=常数,线膨胀系数为α,外侧环境温度降低t℃,内侧环境温度升高t℃,引起的C点竖向位移大小为( )。
图示刚架,EI=常数,结点A的转角是( )。(提示:利用转动刚度的概念)
用位移法计算图示结构,已知典型方程的系数r11=27EI/l3,R1P=-F/2,各柱EI=常数,右柱底的弯矩为( )。A.-Fl/8B.-Fl/9C.Fl/8D.Fl/9
如图所示组合结构,梁式杆件EI=常数,桁架杆件EA=常数,C点竖向位移为( )。 A、向上 B、向下 C、为零 D、需计算确定
图所示结构,EI=常数,截面高h=常数,线膨胀系数为α,外侧环境温度降低t℃,内侧环境温度升高t℃,引起的C点竖向位移大小为( )。
图示结构B处弹性支座的弹性刚度k=3EI/l3,B结点向下的竖向位移为( )A.Pl3/(12EI)B.Pl3/(6EI)C.Pl3/(4EI)D.Pl3/(3EI)
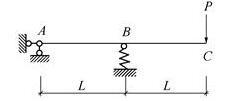
图示结构,EI为常数。结点B处弹性支撑刚度系数k=3EI/L3,C点的竖向位移为( )。
图示结构B处弹性支座的弹簧刚度k=12EI/l3,B截面的弯矩为( )。A. Pl/2B. Pl/3C. Pl/4D. Pl/6
图示结构A点的竖向位移(向下为正)为( )。A.5Fa3/(3EI)+3125Fa/(144EA)B.8Fa3/(EI)+25Fa/(EA)C.31.25Fa/(EA)D.58Fa3/(EI)
图示结构,EI=常数,已知结点C的水平线位移为ΔCH=7ql4/184EI(→) 点C的角位移φC应为:
图示结构,各杆EI、EA相同,K、H两点间的相对线位移为:
图示结构B截面转角位移为(以顺时针为正)( )。A.Pl2/(EI)B.Pl2/(2EI)C.Pl2/(3EI)D.Pl2/(4EI)
图示结构,各杆EI、EA相同,C点的竖向位移应:A.向上 B.向下 C.为零 D.不能确定
图示结构EI=常数,A点的竖向位移(向下为正)为( )。{图}A.20Pl3/(3EI)B.16Pl3/(3EI)C.-8Pl3/(3EI)D.8Pl3/(3EI)
图示结构各杆EI=常数,其C端的水平位移(→)为: