图示结构B处弹性支座的弹簧刚度k=12EI/l3,B截面的弯矩为( )。A. Pl/2B. Pl/3C. Pl/4D. Pl/6
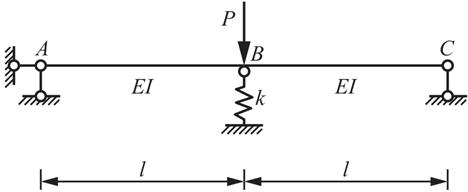
图示结构B处弹性支座的弹簧刚度k=12EI/l3,B截面的弯矩为( )。
A. Pl/2
B. Pl/3
C. Pl/4
D. Pl/6
B. Pl/3
C. Pl/4
D. Pl/6
参考解析
解析:利用力法求解,取基本结构,断开B处支座,反力以X1代替。在B处施加向下的单位力,分别作出荷载作用下与单位力作用下基本结构的弯矩,并进行图乘,可求得δ11=l^3/(6EI),Δ1P=Pl^3/(6EI),列出力法的基本方程:X1δ11+Δ1P=-X1/k,解得X1=-2P/3。将荷载作用下与单位力作用下的弯矩图叠加,可求得原结构B截面弯矩:MB=MBP+MB1×X1=Pl/2-(l/2)×(2P/3)=Pl/6(下侧受拉)。
相关考题:
有以下程序:includestdio.hmain( ) { int a,b,k,m,*pl,*p2; k=1,m=8; p1=k,p2=stdio.hmain( ){ int a,b,k,m,*pl,*p2;k=1,m=8;p1=k,p2=m;a=/*pl-m;b=*p1+*p2+6;printf(%d,a);printf(%d\n,b);}编译时编译器提示错误信息,你认为出错的语句是( )。A.a=/*pl-m;B.b=*p1+*p2+6;C.k=1,m=8;D.pl=&k,p2-&m;
阅读以下应用说明、图和C++程序,将C++程序中(1)~(6)空缺处的语句填写完整。【说明】以下【C++程序】用于实现两个多项式的乘积运算。多项式的每一项由类Item描述,而多项式由类List描述。类List的成员函数主要有:createList():创建按指数降序链接的多项式链表,以表示多项式:reverseList():将多项式链表的表元链接顺序颠倒:multiplyList(ListL1,ListL2)计算多项式L1和多项式L2的乘积多项式。【C++程序】include <iostream.h>class List;class Item {friend class List;private:double quot ;int exp ;Item *next;Public:Item(double_quot,int_exp){ (1) ;}};class List{private:Item *list;Public:List(){list=NULL:}void reverseList();void multiplyList(List L1,List L2);void createList();};void List::createList(){ Item *p,*U,*pre;int exp;double quot;list = NULL;while (1) {cout << "输入多项式中的一项(系数、指数) :" << endl;cin >> quot >> exp:if ( exp<0 )break ; //指数小于零,结束输入if ( quot=0 )continue;p = list;while ( (2) ) { //查找插入点pre = p;p = p->next;}if ( p != NULL exp = p->exp ) {p->quot += quot;continue ;}u =(3);if (p == list)list = u;elsepre->next = u;u ->next = p;}}void List::reverseList(){ Item *p, *u;if ( list==NULL )return;p = list ->next;list -> next = NULL;while ( p != NULL) {u = p -> next;p ->next = list;list = p;p = u;}}void List::multiplyList ( List L1, List L2 ){ Item *pL1,*pL2,*u;int k, maxExp;double quot;maxExp =(4):L2.reverseList();list=NULL;for ( k = maxExp;k >= 0;k-- ){pL1 = L1.list;while ( pL1 != NULL pL1 -> exp > k )pL1 = pL1 ->next;pL2 = L2.1ist;while (pL2 NULL (5))pL2 = pL2 -> next;quot = 0.0;while (pL1 != NULL pL2 != NULL){if(pL1->exp+pL2->exp==k) {(6)pL1 = pL1 -> next;pL2 = pL2 -> next;} else if ( pL1 -> exp + pL2 -> exp > k )pL1 = pL1 -> next;elsepL2 = pL2 -> next;}if ( quot !=0.0 ) {u = new item( quot, k );u -> next = list;list = u;}}reverseList ();L2. reverseList ():}void main(){ List L1,L2,L;
有以下程序: includestdio.h main( ) { int a,b,k,m,*pl,*p2; k=1,m=8; p1=stdio.h main( ) { int a,b,k,m,*pl,*p2; k=1,m=8; p1=k,p2=m; a=/*pl-m;b=*p1+*p2+6; printf("%d",a);printf("%d\n",b); } 编译时编译器提示错误信息,你认为出错的语句是( )。A.a=/*pl-m;B.b=*p1+*p2+6;C.k=1,m=8;D.pl=k,p2-m;
—跨度为l的简支架,若仅承受一个集中力P,当P在梁上任意移动时,梁内产生的最大剪力Qmax和最大弯矩Mmax分别满足:A.Qmax≤P,Mmax=Pl/4B. Qmax≤P/2,Mmax=Pl/4C. Qmax≤P,Mmax=Pl/4D.Qmax≤P/2,Mmax=Pl/2
简支梁水平放置,中点受竖向力P作用,梁长度为L,最大弯矩发生在()A、中点截面Mmax=PL/2B、中点截面Mmax=PL/4C、L/4截面Mmax=PL/8D、L/4截面Mmax=PL/2
单选题图示结构值的大小为( )。A Pl/2B Pl/3C Pl/4D Pl/5