某工程时标网络图如下图所示,则工作A的自由时差为( )。A:0B:1C:2D:3
图所示中,用力法解图(a)所示结构(图中kM为弹性铰支座A的转动刚度系数),取图(b)所示的力法基本体系,力法典型方程为( )。
如图a)所示结构,若将链杆撤去,取图b)为力法基本体系,则力法方程及知分别为:
图b)是图a)结构的力法基本体系,则力法方程中的系数和自由项为:A.Δ1P>0, δ121P121P>0, δ12>0 D. Δ1P12>0
用力法求解图示结构(EI=常数),基本体系及基本未知量如图所示,力法方程中系数△1P为:
用力法计算图(a)所示结构,取基本结构如图(b)所示,其中系数δ11为( )。
如图a)所示结构,EI=常数,取图b)为力法基本体系,则下述结果中错误的是: A.δ23=0B. δ31=0C.Δ2P=0D.δ12=0
图所示为两次超静定结构,下列图中作为力法的基本结构求解过程最简便的是( )。 A、A B、B C、C D、D
如图a所示桁架,EA为常数,取图b为力法基本体系,则力法方程系数间的关系为( )。 A、δ22<δ11,δ12>0 B、δ22>δ11,δ12>0 C、δ22<δ11,δ12<0 D、δ22>δ11,δ12<0
如图所示,用力法且采用图(b)所示的基本体系计算图(a)所示梁,Δ1P为( )。
图示结构取图(b)为力法基本体系,EI为常数,下列哪项是错误的?( )
如图(a)所示的结构,EI=常数,取图(b)为力法基本体系,则下列各项错误的是( )。 A、δ23=0 B、δ31=0 C、Δ2P=0 D、δ12=0
用位移法求解图所示结构,独立的基本未知量个数为( )。 A、1 B、2 C、3 D、4
用力法求解图所示结构(EI=常数),基本体系及基本未知量如图所示,力法方程中的系数为( )。
如图a)所示桁架,EA=常数,取图b)为力法基本体系,则力法方程系数间的关系为:A. δ2211,δ12>0 B.δ22>δ11,δ12>0C. δ2211,δ1222>δ11,δ12
图所示结构取图(b)为力法基本体系,El为常数,下列哪项是错误的[A8] ?( )
图a)所示结构,取图b)为力法基本体系,则力法方程中的Δ2C为: A. a+bB. a+lθC. -aD. a
图中,用力法求解图(a)所示结构,取图(b)所示力法基本体系,则力法典型方程δ11X1+Δ1p=0中的Δ1P之值为( )。
图示结构支座A下沉了d并发生了顺时针方向转角α,当用力法计算并取图(b)为基本结构时,力法方程应为( )。
图所示为超静定桁架的基本结构及多余为知力X=1作用下的各杆内力,EA为常数,则为( )。
图a)所示桁架,EA=常数,取图b)为力法基本体系,则力法方程系数间的关系为:A.δ11=δ22,δ12>0 C.δ11≠δ22,δ12>0B.δ11≠δ22,δ1211=δ22,δ12
如图a)所示结构,取图b)为力法基本体系,EI=常数,Δ1P为:
如图a)所示桁架各杆EA均为有限值。当撤去杆AB采用图b)为力法基本体系时,相应力法方程的右端项应:A. >0 B. 1、P2的关系而定
如图a)所示结构,取图b)为力法基本体系,则力法方程中的Δ2C为: A. a+b B. a+lθ C. -a D. a
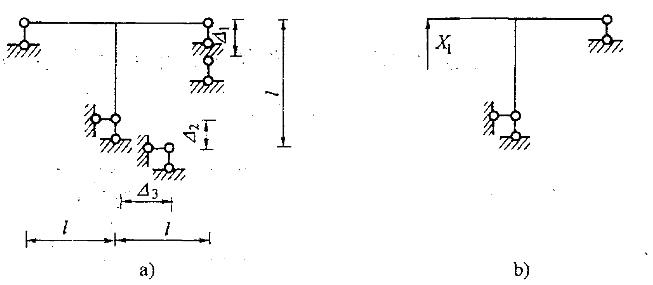
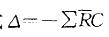
如图a)所示结构,取图b)为力法基本体系,相应力法方程为δ11X1+Δ1C=0,其中Δ1C为:A. Δ1+Δ2B. Δ1+Δ2+Δ3C. 2Δ2-Δ1D. Δ1-2Δ2
图a)所示桁架,EA=常数,取图b)为力法基本体系,则力法方程系数间的关系为:A. δ2211,δ12>0 B.δ22>δ11,δ12>0C. δ2211,δ1222>δ11,δ12
二值图象中分支点的连接数为()。A、0B、1C、2D、3
 求,或根据几何关系分析。
求,或根据几何关系分析。