图示平面机构中,机构自由度数为( )。A. 0B. 1C. 2D. 3
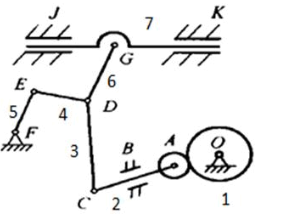
图示平面机构中,机构自由度数为( )。

A. 0
B. 1
C. 2
D. 3
B. 1
C. 2
D. 3
参考解析
解析:根据计算自由度应考虑的问题可知,在该机构中,存在局部自由度A、复合铰链D以及虚约束J或K。如题50解图所示,对于该机构,活动构件数n=7。滚轮A与构件2组成的转动副为一个局部自由度,在计算自由度时应除去不计;三个构件3、4和6在同一处组成复合铰链,其实际转动副数为3-1=2个;构件7与固定构件J和K组成移动副,且两移动副中心线重合,因此构成机构中的虚约束,在计算机构自由度时仅考虑一处J或K;转动副O、C、E、F、G;构件2与B组成一个移动副。因此低副数目PL=2+1+5+1=9。滚轮A与O组成一个高副,则高副数目PH=1。所以其自由度为F=3n-2PL-PH=3×7-2×9-1=2。
相关考题:
以下关于自由度的描述正确的有()A、机构的自由度应当等于原动件数B、机构的自由度应当大于原动件数C、在平面机构中,每增加一个低副,机构失去两个自由D、在平面机构中,每增加一个高副,机构失去一个自由度E、在平面机构中,每增加一个低副,机构失去一个自由度F、在平面机构中,每增加一个高副,机构失去两个自由度
单选题A-2-4-04-3-2、机构具有确定相对运动的条件是()。A机构的自由度数目等于主动件数目B机构的自由度数目大于主动件数目C机构的自由度数目小于主动件数目D机构的自由度数目大于等于主动件数目
单选题机构具有确定运动的条件是()。A机构的自由度大于零;B机构的自由度大于零且自由度数等于原动件数;C机构的自由度大于零且自由度数大于原动件数;D前面的答案都不对。