设a、b及φ分别为图示结构A支座发生的移动及转动,由此引起的B点水平位移(向左为正)ΔBH为:A. hφ-a. B. hφ+a C. a-hφ D. 0
设a、b及φ分别为图示结构A支座发生的移动及转动,由此引起的B点水平位移(向左为正)ΔBH为:
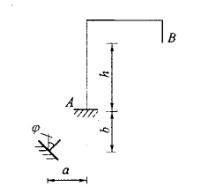
A. hφ-a. B. hφ+a C. a-hφ D. 0
A. hφ-a. B. hφ+a C. a-hφ D. 0
参考解析
解析:提示:用 计算,或直接根据位移后的几何关系分析。
计算,或直接根据位移后的几何关系分析。
计算,或直接根据位移后的几何关系分析。
相关考题:
结构简图中的抽象支座形式很多,其主要形式有固定铰支座,可动铰支座,固定端支座,其中关于可动铰支座说法正确的是( )。A.构件可绕支座任意转动,但该支座不可有水平方向和垂直方向的任何移动B.构件可绕支座任意转动,可沿支座水平方向移动,但垂直方向不可有任何移动C.支座处完全是固结的,既不可转动,也不可有水平和垂直方向的任何移动D.构件可绕支座任意转动,可沿支座水平方向移动,沿垂直方向也可以随意转动
下面关于支座与结点的论述,哪项错误?( )A.铰支座A表示结构可以绕A点转动,但A点的水平位移和竖向位移被限制B.滚轴支座A表示允许结构绕A点转动,又允许结构沿平行支承面方向滑动,但A点处垂直支承面的移动则被限制C.刚性支座的特征是支座处各杆之间可以相互传递弯矩D.铰结点的特征是结点处各杆都可以绕铰结点自由转动
下列关于支座与节点的论述,错误的是( )。A.铰支座A表示结构可以绕A点转动,但A点的水平位移和竖向位移被限制B.滚轴支座A表示容许结构绕A点转动,又容许结构沿平行支承方向滑动,但A点处垂直支承面的移动则被限制C.刚支座的特征是节点处各杆之间可以相互传递弯矩D.铰节点的特征是节点处各杆都可以绕铰节点自由转动
大坝的水平位移符号规定为()。A、向上为正,向下为负;向左为正,向右为负B、向上为正,向下为负;向左为负,向右为正C、向上为负,向下为正;向左为正,向右为负D、向上为负,向下为正;向左为负,向右为正