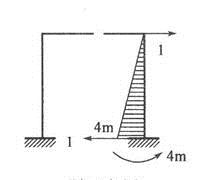
图所示结构,各杆,当支座B发生图示的移动时,结点E的水平位移为( )。
图所示结构,各杆,当支座B发生图示的移动时,结点E的水平位移为( )。

参考解析
解析:应用单位荷载法。把结构从中间截开,先求在支座移动下的弯矩图,基本体系和虚拟状态下的弯矩1、2、3如图,用力法做出结构弯矩图。然后采用图乘法计算结构的位移为:


相关考题:
下面关于支座与结点的论述,哪项错误?( )A.铰支座A表示结构可以绕A点转动,但A点的水平位移和竖向位移被限制B.滚轴支座A表示允许结构绕A点转动,又允许结构沿平行支承面方向滑动,但A点处垂直支承面的移动则被限制C.刚性支座的特征是支座处各杆之间可以相互传递弯矩D.铰结点的特征是结点处各杆都可以绕铰结点自由转动
下列关于支座与节点的论述,错误的是( )。A.铰支座A表示结构可以绕A点转动,但A点的水平位移和竖向位移被限制B.滚轴支座A表示容许结构绕A点转动,又容许结构沿平行支承方向滑动,但A点处垂直支承面的移动则被限制C.刚支座的特征是节点处各杆之间可以相互传递弯矩D.铰节点的特征是节点处各杆都可以绕铰节点自由转动
下面关于支座与结点的论述,哪项是错误的?( )A.铰支座A表示结构可以绕A点转动,但A点的水平位移和竖向位移被限制B.滚轴支座A表示允许结构绕A点转动,又允许结构沿平行支撑面方向滑动,但A点处垂直支撑面的移动则被限制C.刚支座的特征是结点处各杆之间可以相互传递弯矩D.铰节点的特征是结点处各杆都可以绕铰结点自由转动
静定结构的支座发生移动时()。A、杆件无变形,结构无位移B、杆件无变形,结构有位移C、杆件有变形,结构无位移D、杆件有变形,结构有位移