图示结构,求A,B两点相对线位移时,虚拟状态应为()A.图(a)B.图(b)C.图(c)D.图(d)
图示结构,EA=常数,C、D两点的水平相对线位移为:
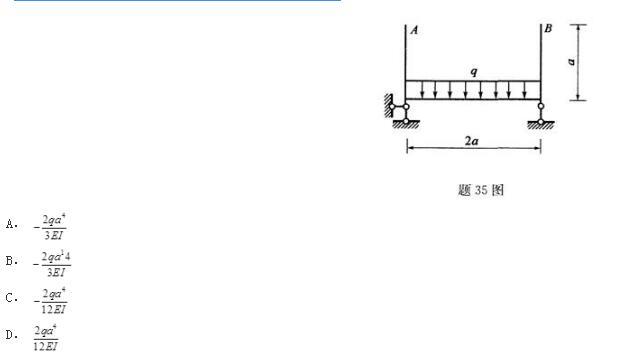
图所示结构A、B两点相对水平位移(以离开为正)为( )。
如图所示的结构中,B支座发生支座移动,D点水平位移(向右为正)为( )。
已知图示结构EI=常数,A、B两点的相对水平线位移为:
如图所示的结构(EI=常数)中,D点水平位移(向右为正)为( )。
设a、b及φ分别为图示结构A支座发生的移动及转动,由此引起的B点水平位移(向左为正)ΔBH为:A. hφ-a.B. hφ+aC. a-hφD. 0
图示三铰拱支座B的水平反力(以向右为正)等于( )。
图示结构A点的竖向位移(向下为正)为( )。A、aB、bC、cD、d
图示排架,已知各单柱柱顶有单位水平力时,产生柱顶水平位移为δAB=δEF=h/100D,δCD=h/200D,D为与柱刚度有关的给定常数,则此结构柱顶水平位移为:
图所示结构,各杆,当支座B发生图示的移动时,结点E的水平位移为( )。
图示结构,EI=常数,已知结点C的水平线位移为ΔCH=7ql4/184EI(→) 点C的角位移φC应为:
图示结构,各杆EI、EA相同,K、H两点间的相对线位移为:
图示结构B截面转角位移为(以顺时针为正)( )。A.Pl2/(EI)B.Pl2/(2EI)C.Pl2/(3EI)D.Pl2/(4EI)
图示结构当水平支杆产生单位位移时(未注的杆件抗弯刚度为EI),B-B截面的弯矩值为( )。
设a、b及φ分别为图示结构A支座发生的移动及转动,由此引起的B点水平位移(向左为正)ΔBH为:A. hφ-a. B. hφ+a C. a-hφ D. 0
图示结构各杆EI=常数,其C端的水平位移(→)为:
求图示结构AB两点的相对线位移,虚设力状态为图() AABBCCDD
图示为梁的虚设力状态,按此力状态及位移计算公式可求出AB两点的相对线位移。 A对B错
变形监测的正负号应遵守以下规定:水平位移以向下游为正,向左岸为正,反之为负;垂直位移以下沉为正,上升为负。
变形观测的正负号规定中,对水平位移()为正,()为正;反之为负。对竖向位移,()为正,()为负。对裂缝()为正,()为负。
水平位移量符号规定为:向()为正、向()为正,反之为负。
填空题变形观测的正负号规定中,对水平位移()为正,()为正;反之为负。对竖向位移,()为正,()为负。对裂缝()为正,()为负。