图 4-37所示机构中,杆 O1A = O2B, O1A∥O2B,杆 O2C = O3D, O2C∥O3D,且O1A = 20cm, O2C= 40cm, CM=MD = 30cm,若杆 O1A以角速度ω= 3rad/s 匀速转动,则M点速度的大小和B点加速度的大小分别为( )。A. 60cm/s, 120cm/s2 B. 120cm/s, 150cm/s2C. 60cm/s, 360cm/s2 D. 120cm/s, 180cm/s2
图 4-37所示机构中,杆 O1A = O2B, O1A∥O2B,杆 O2C = O3D, O2C∥O3D,且O1A = 20cm, O2C= 40cm, CM=MD = 30cm,若杆 O1A以角速度ω= 3rad/s 匀速转动,则M点速度的大小和B点加速度的大小分别为( )。
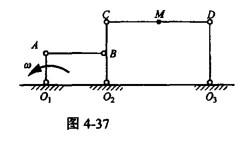
A. 60cm/s, 120cm/s2 B. 120cm/s, 150cm/s2
C. 60cm/s, 360cm/s2 D. 120cm/s, 180cm/s2
A. 60cm/s, 120cm/s2 B. 120cm/s, 150cm/s2
C. 60cm/s, 360cm/s2 D. 120cm/s, 180cm/s2
参考解析
解析:提示:杆AB和CD均为平行移动刚体。
相关考题:
直角刚杆OAB在图示瞬间角速度ω=2rad/s,角加速度ε=5rad/s2,若OA=40cm,AB=30cm,则B点的速度大小、法向加速度的大小和切向加速度的大小为:A.100cm/s;200cm/s2;250cm/s2B.80cm/s2;160cm/s2;200cm/s2C.60cm/s2;120cm/s2;150cm/s2D.100cm/s2;200cm/s2;200cm/s2
曲柄机构在其连杆AB的中点C与CD杆铰接,而CD杆又与DF杆铰接,DE杆可绕E点转动。曲柄OA以角速度ω= 8rad/s绕O点逆时针向转动。且OA = 25cm,DE=100cm。在图示瞬时,O、A、B三点共在一水平线上,B、E两点在同一铅直线上,∠CDE=90°,则此时DE杆角速度ωDE的大小和方向为:
一机构由杆件O1A、O2B和三角形板ABC组成。已知:O1A杆转动的角速度为ω(逆时针向),O1A=O2B=r,AB=L,AC=h,则在图示位置时,C点速度vc的大小和方向为:A. vc = rω,方向水平向左B.vc=rω,方向水平向右C.vc = (r+h)ω,方向水平向左D. vc = (r+/h)ω,方向水平向右
图示均质杆AB的质量为m,长度为L,且O1A = O2B=R,O1O2=AB=L。当φ=60°时,O1A杆绕O1轴转动的角速度为ω,角加速度为α,此时均质杆AB的惯性力系向其质心C简化的主矢FI和主矩MIC的大小分别为:A. FI=mRα ,MIC=1/3mL2α B. FI=mRω2 ,MIC = 0
杆OA绕固定轴O转动,圆盘绕动轴A转动,已知杆长l=20cm,圆盘r=10cm,在图示位置时,杆的角速度及角加速度分别为w=4rad/s,ε=3rad/s2;圆盘相对于OA的角速度和角加速度分别为wr=6rad/s,εr=4rad/s2。则圆盘上M1点绝对加速度为( )。A.a1=363cm/s2B.a1=463cm/s2C.a1=563cm/s2D.a1=663cm/s2
图示均质杆AB的质量为m,长度为L,且O1A = O2B=R,O1O2=AB=L。当φ=60°时,O1A杆绕O1轴转动的角速度为ω,角加速度为α,此时均质杆AB的惯性力系向其质心C简化的主矢FI和主矩MIC的大小分别为:A. FI=mRα ,MIB=1/3mL2αC. FI=mRω2 ,MID = 0
细直杆AB由另二细杆O1A与O2B铰接悬挂。O1ABO2并组成平等四边形。杆AB的运动形式为:A.平移(或称平动)B.绕点O1的定轴转动C.绕点D的定轴转动(O1D)=DO2=BC=l/2,AB=lD.圆周运动
在图示机构中,杆O1A =O2B,O1A//O2B,杆O2C =杆O3D,O2C//O3D, 且O1A = 20cm,O2C = 40cm,若杆O1A以角速度ω=3 rad/s匀速转动,则杆CD上任意点M速度及加速度的大小为: A. 60 cm/s; 180 cm/s2 B. 120 cm/s;360 cm/s2 C. 90 cm/s;270 cm/s2 D. 120 cm/s;150 cm/s2
图4-42所示机构由杆O1A、O2B和三角板ABC组成。已知:杆O1A转动的角速度为ω,O1A=O2B=r, AC = h, O1O2 = AB,则图示瞬时点C速度vc的大小和方向为( )。 A. vc = rω,方向水平向左 B. vc = rω,方向水平向右C. vc = (r+h)ω方向水平向左 D. vc= (r + h)ω,方向水平向右点
如图4-53所示,平面机构在图示位置时,杆AB水平而杆OA铅直,若B点的速度vB≠0,加速度aB=0。则此瞬时杆OA的角速度、角加速度分别为( )。A.ω=0,α≠0 B.ω≠0,α≠0 C.ω=0,α=0 D.ω≠0,α=0
单选题直角刚杆OAB在图示瞬时角速度ω=2rad/s,角加速度ε=5rad/s2,若OA=40cm,AB=30cm,则B点的速度大小、法向加速度的大小和切向加速度的大小为()。A100cm/s;200cm/s2;250cm/s2B80cm/s;160cm/s2;200cm/s2C60cm/s;120cm/s2;150cm/s2D100cm/s;200cm/s2;200cm/s2
单选题直角刚杆OAB在图示瞬时角速度ω=2rad/s,角加速度ε=5rad/s2/ OA=40cm,AB=30cm,则B点的速度大小、法向加速度的大小和切向加速度的大小为()。A100cm/s;200cm/s2;250cm/s2B80cm/s;160cm/s2;200cm/s2C60cm/s;120cm/s2;150cm/s2D100cm/s;200cm/s2;200cm/s2