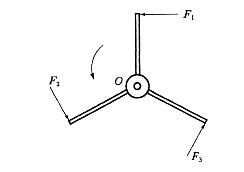
图示绞盘有三个等长为l的柄,三个柄均在水平面内,其间夹角都是120°。如在水平面内,每个柄端分别作用一垂直于柄的力F1、F2、F3,且有F1=F2=F3=F,该力系向O点简化后的主矢及主矩应为:
图示绞盘有三个等长为l的柄,三个柄均在水平面内,其间夹角都是120°。如在水平面内,每个柄端分别作用一垂直于柄的力F1、F2、F3,且有F1=F2=F3=F,该力系向O点简化后的主矢及主矩应为:

参考解析
解析:提示:主矢为二力的矢量和,对O点的王矩为二力分别对O点力矩的代数和。
相关考题:
若程序中定义了三个函数f1,f2,f3,并且函数f1执行时会调用f2、函数f2执行时会调用f3,那么正常情况下,()。A.f3执行结束后返回f2继续执行,f2执行结束后返回f1继续执行B.f3执行结束后返回f1继续执行,f1执行结束后返回f2继续执行C.f2执行结束后返回f3继续执行,f3执行结束后返回f1继续执行D.f2执行结束后返回f1继续执行,f1执行结束后返回f3继续执行
● 若程序中定义了三个函数f1、f2和f3,并且函数f1调用f2、f2调用f3,那么程序运行时不出现异常的情况下,函数的返回方式为(32) 。(32)A. 先从f3返回f2,然后从f2返回f1B. 先从f3返回f1,然后从f1返回f2C. 先从f2返回f3,然后从f3返回f1D. 先从f2返回f1,然后从f1返回f3
如图所示,一绞盘有三个等长的柄,长为L,相互夹角为120°,各柄柄端作用有与轴线垂直的力P,将该力系向BC连线的中点D简化,其结果为()。 A.R=P,MD=3PLB.R=0,MD=3PLC.R=2P,MD=3PLD.R=0,MD=2PL
在图示三个振动系统中,物块的质量均为m,弹賛的刚性系数均为k,摩擦和弹簧的质量不计。设图a)、b)、c)中弹簧的振动频率分别为f1、f2、f3,则三者的关系有:A.f1=f2≠f3B. f1≠f2=f3C. f1=f2=f3D. f1≠f2≠f3
在图示三个振动系统中,物块的质量均为m,弹賛的刚性系数均为k,摩擦和弹簧的质量不计。设图a)、b)、c)中弹簧的振动频率分别为f1、f2、f3,则三者的关系有:A.f1=f2≠f3 B. f1≠f2=f3 C. f1=f2=f3 D. f1≠f2≠f3
若程序中定义了三个函数f1、f2和f3,并且函数f1执行时会调用f2、函数f2执行时会调用f3,那么正常情况下,( )。 A.f3执行结束后返回f2继续执行,f2结束后返回f1继续执行 B.f3执行结束后返回f1继续执行,f1结束后返回f2继续执行 C. f2执行结束后返回f3继续执行,f3结束后返回f1继续执行 D.f2执行结束后返回f1继续执行,f1结束后返回f3继续执行
某产品的功能现实成本为5000元,目标成本为4500元,该产品分为三个功能区,各功能区的重要性系数和现实成本见下表。则应用价值工程时,优先选择的改进对象依次为( )。A:F1—F2—F3B:F1—F3—F2C:F2—F3—F1D:F3—F1—F2
下列对断层的定名中,哪个选项是正确的( ) A. F1、F2、F3均为正断层 B. F1、F2、F3均为逆断层 C. F1、F3为正断层,F2为逆断层 D. F1、F3为逆断层,F2为正断层
已知F1、F2、 F3、 F4为作用于刚体上的平面汇交力系,其力矢关系如图4-3所示, 由此可知( )。A.该力系的主矢FR = 0 B.该力系的合力FR = F4C.该力系的合力FR= 2F4 D.该力系平衡
一物体位于光滑水平面上,同时受到三个水平共点力F1、F2和F3作用,其大小分别为:F1=42N、F2=28N、F3=20N,且F1的方向指向正北。下列说法中错误的是()A、这三个力的合力可能为零B、F1、F2两个力的合力大小可能为20NC、若物体处于匀速直线运动状态,则F2、F3的合力大小为48N,方向指向正南D、若物体处于静止状态,则F1、F3的合力大小一定为28N
有A、B、C三个影响房地产价格的因素,其中A的影响最大,B次之,C最小,分别赋予的权重为f1、f2、f3,此三者的大小关系应为()。A、f1<f2<f3B、f1>f2>f3C、f1=f2=f3D、无关
一个物体受到三个共点力的作用,在下列给出的几组力中,能使物体处于平衡状态的是()A、F1=3N;F2=4N;F3=2NB、F1=3N;F2=1N;F3=5NC、F1=2N;F2=5N;F3=10ND、F1=5N;F2=7N;F3=13N
甲乙叠放在水平面上,现对甲施加水平向右的力F,使它们一起向右匀速运动,则甲对乙摩擦力f1和水平面对乙摩擦力f2分别为()A、f1=F向右,f2=F向左B、f1=F向左,f2=F向右C、f1=0,f2=F向右D、f1=0,f2=F向左
填空题一铰盘有三个等长的柄,长度为L相互夹角为120。,如图所示。每个柄端作用于一垂直手柄的力P。将该力系向BC连线的中点D简化,其结果为()。