固定铰支座处的截面有() A、水平约束反力B、竖向约束反力C、约束力矩D、水平位移E、转角位移
()允许试验结构在三个方向上产生转动,其支座反力使试验结构处于单向受压荷载作用。 A、固定端支座B、滚动铰支座C、固定铰支座D、固定球铰支座
对于杆件的弯曲变形,其约束条件如下说法正确的有()。 A.在固定铰支座和滚轴支座处,挠度为零B.在固定铰支座和滚轴支座处,转角为零C.在固定端处,挠度为零D.在固定端处,转角为零
断层构造中,破裂面两侧岩体()。 A、发生了微小位移B、未发生微小位移C、发生了明显的相对位移D、未发生明显的相对位移
如图所示的结构中,B支座发生支座移动,D点水平位移(向右为正)为( )。
如图所示的一三铰刚架,其右支座发生了位移,位移的水平分量为Δ1,竖向分量为Δ2,则右半部的转角为( )。
如图所示的三铰拱,支座A的水平反力(以向右为正)是( )kN。 A、1/2 B、1 C、2 D、3
图示结构支座A下沉了d并发生了顺时针方向转角α,当用力法计算并取图(b)为基本结构时,力法方程应为( )。
图示结构支座B发生了移动,则点C的竖向位移( )。{图1}
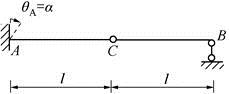
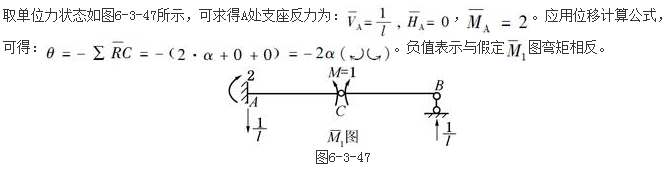
图示结构,当支座A发生顺时针转角φA时,D点的竖向位移为:A.φAa,向下 B. φAa,向上 C.2φAa,向下 D.2φAa,向上
如图所示。支座B发生了移动,则点C的竖向位移为( )。
能够限制物体角位移的约束是( )。A.固定铰支座B.固定端支座C.简单铰支座D.滚动铰支座
下面关于支座与结点的论述,哪项错误?( )A.铰支座A表示结构可以绕A点转动,但A点的水平位移和竖向位移被限制B.滚轴支座A表示允许结构绕A点转动,又允许结构沿平行支承面方向滑动,但A点处垂直支承面的移动则被限制C.刚性支座的特征是支座处各杆之间可以相互传递弯矩D.铰结点的特征是结点处各杆都可以绕铰结点自由转动
下列关于支座与节点的论述,错误的是( )。A.铰支座A表示结构可以绕A点转动,但A点的水平位移和竖向位移被限制B.滚轴支座A表示容许结构绕A点转动,又容许结构沿平行支承方向滑动,但A点处垂直支承面的移动则被限制C.刚支座的特征是节点处各杆之间可以相互传递弯矩D.铰节点的特征是节点处各杆都可以绕铰节点自由转动
图示为梁的虚设力状态,按此力状态及位移计算公式可求出梁铰B两侧截面的相对转角。 A对B错
()支座可容许结构绕铰子转动但不能移动。A、固定铰支座B、固定支座C、活动铰支座D、定向支座
能够限制物体角位移的约束是()A、固定铰支座B、固定端支座C、简单铰D、滚动铰支座
能够限制角位移的支座是()A、固定铰支座与定向支座B、固定支座与定向支座C、固定铰支座与固定支座D、滚动铰支座与固定铰支座
若梁上中间铰处无集中力偶作用,则在中间铰左、右两截面处的挠度()(相等、不等),转角()(相等、不等)。
能够限制物体角位移的约束是()。A、固定铰支座B、固定端支座C、简单铰支座D、滚动铰支座
板式橡胶支座的工作原理为利用橡胶的()实现转角,利用橡胶的()实现水平位移。
当干字形单回路转角塔三相导线的横担宽度或悬挂点预偏距离各不相同时,其偏移方向和数值应以使两侧直线杆塔上()相转角最小为原则进行位移。A、上B、左C、右D、控制
单选题能够限制角位移的支座是()A固定铰支座与定向支座B固定支座与定向支座C固定铰支座与固定支座D滚动铰支座与固定铰支座
单选题()允许试验结构在三个方向上产生转动,其支座反力使试验结构处于单向受压荷载作用。A固定端支座B滚动铰支座C固定铰支座D固定球铰支座
单选题单跨简支结构构件和连续梁试验的支座,除一端支座应为固定铰支座外,其他支座应为()A滚动支座B铰支座C滚动铰支座D固定支座
单选题能够限制物体角位移的约束是()A固定铰支座B固定端支座C简单铰D滚动铰支座
单选题能够限制物体角位移的约束是()。A固定铰支座B固定端支座C简单铰支座D滚动铰支座