图示为梁的虚设力状态,按此力状态及位移计算公式可求出梁铰B两侧截面的相对转角。 A对B错
图示为梁的虚设力状态,按此力状态及位移计算公式可求出梁铰B两侧截面的相对转角。 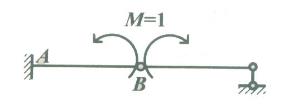

A对
B错
参考解析
略
相关考题:
下列说法正确的是()。A、单位荷载法计算位移的单位荷载根据计算方便进行假设B、虚功中的位移状态是不能进行虚设的C、虚功原理包括平衡条件和几何条件(位移协调条件)D、利用一个假定的虚拟单位力状态可能求出多个位移
下列不属于连续化方法计算联肢剪力墙的假定是()。A、忽略连梁轴向变形,即假定两墙肢水平位移完全相同B、两墙肢各截面的转角和曲率都相等C、各墙肢截面、各连梁截面及层高等几何尺寸沿全高是相同的D、连梁仅承受轴力,不承受剪力
单选题下列说法正确的是()。A单位荷载法计算位移的单位荷载根据计算方便进行假设B虚功中的位移状态是不能进行虚设的C虚功原理包括平衡条件和几何条件(位移协调条件)D利用一个假定的虚拟单位力状态可能求出多个位移
问答题在图乘法中,需要计算某点的竖向位移,应在该点虚设什么方向的单位力?需要计算某点的水平位移,应在该点虚设什么方向的单位力?需要计算该点的转角,应该虚设什么?