平面四连杆机构ABCD如图所示,如杆AB以等角速度ω= 1rad/s绕A轴顺时针向转动,则CD杆角速度ωCD的大小和方向为:A. ωCD= 0. 5rad/s,逆时针向B. ωCD= 0. 5rad/s,顺时针向C. ωCD= 0. 25rad/s,逆时针向D. ωCD= 0. 25rad/s,顺时针向
平面四连杆机构ABCD如图所示,如杆AB以等角速度ω= 1rad/s绕A轴顺时针向转动,则CD杆角速度ωCD的大小和方向为:
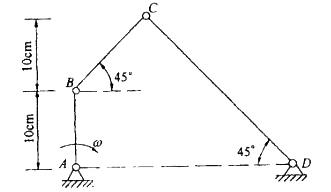
A. ωCD= 0. 5rad/s,逆时针向
B. ωCD= 0. 5rad/s,顺时针向
C. ωCD= 0. 25rad/s,逆时针向
D. ωCD= 0. 25rad/s,顺时针向
B. ωCD= 0. 5rad/s,顺时针向
C. ωCD= 0. 25rad/s,逆时针向
D. ωCD= 0. 25rad/s,顺时针向
参考解析
解析:提示:CB平面运动,速度投影定理。
相关考题:
有以下程序 main() { char s[]="ABCD",*p; for(p=s+1;p<s+4;p++)printf("%s\n",p); } 程序运行后的输出结果是A.ABCD BCD CD DB.A B C DC.B C DD.BCD CD D
下面程序的输出是______。 char s[]="ABCD"; main() { char *p; for(p=s;p<s+4;p++) printf("%s\n",p); }A.ABCD BCD CD DB.A B C DC.D C B AD.ABCD ABC AB A
有以下程序: include main ( ){char s[] = "ABCD", * p;for(p=s+1;p 有以下程序: #include < stdio. h > main ( ) { char s[] = "ABCD", * p; for(p=s+1;p<s+4;p++) pfintf(" % s \n" ,p); }A.ABCD BCD CD DB.A B CC.B C DD.BCD CD D
下列关于CD-ROM驱动器速度的( )是正确的。Ⅰ 18速CD-ROM驱动器的速度是1200KB/sⅡ 24速CD-ROM驱动器的速度是2400B/sⅢ CD-ROM驱动器最低数据传输率是150KB/sⅣ CD-ROM驱动器的速度可以用平均数据传输率来衡量A.仅ⅢB.仅ⅣC.Ⅰ、ⅡD.Ⅰ、Ⅱ、Ⅲ
下面程序的输出结果是( )。 char s()="ABCD",*p; main() { for(p=s;p<s+4;p++)printf("%s\n",p); )A.ABCD BCD CD DB.A B C DC.D C B AD.ABCD ABC AB A
胎头向哪个方向转动才能娩出A.顺时针转90。B.逆时针转90。C.逆时针转45。SXB 胎头向哪个方向转动才能娩出A.顺时针转90。B.逆时针转90。C.逆时针转45。D.顺时针转45。E.不需转动
直角刚杆OAB可绕固定轴O在图示平面内转动,已知OA=40cm,AB=30cm,ω =2rad/s,α=1rad/s2,则图示瞬时,B点加速度在y方向的投影为:A. 40cm/s2 B. 200cm/s2 C. 50 cm/s2 D. -200cm/s2
在图示机构中,杆O1A =O2B,O1A//O2B,杆O2C =杆O3D,O2C//O3D, 且O1A = 20cm,O2C = 40cm,若杆O1A以角速度ω=3 rad/s匀速转动,则杆CD上任意点M速度及加速度的大小为: A. 60 cm/s; 180 cm/s2 B. 120 cm/s;360 cm/s2 C. 90 cm/s;270 cm/s2 D. 120 cm/s;150 cm/s2
直角刚杆OAB 在图示瞬时有ω= 2rad/s,α=5rad/s2,若 OA = 40cm,AB=30cm,则B点的速度大小为:A. 100cm/s B. 160cm/s C. 200cm/s D. 250cm/s
一梯形断面的明渠,水力半径R=0. 8m,底坡i=0. 0006,粗糙系数n=0. 025,作均匀流时该渠的断面平均流速为:A. 0. 96m/s B. 1. 0m/s C. 0. 84m/s D. 1. 2m/s
两条直导线互相垂直,如图10—12所示,但相隔一个小距离,其中一条AB是固定的,另一条CD能自由转动,当电流按图示方向通入两条导线时,CD导线将 ( )A.顺时针方向转动,同时靠近导线ABB.逆时针方向转动,同时离开导线ABC.顺时针方向转动,同时离开导线ABD.逆时针方向转动,同时靠近导线AB
平面四连杆机构ABCD如图所示,如杆AB以等角速度ω=1rad/s绕A轴顺时针向转动,则CD杆角速度ωCD的大小和方向为( )。A.ωC.D.=005rA.D./s,逆时针向B.ωC.D.=05rA.D./s,顺时针向C.ωC.D.=025rA.D./s,顺时针向D.ωC.D.=025rA.D./s,逆时针向
在图示机构中,杆O1A =O2B,O1A//O2B,杆O2C =杆O3D,O2C//O3D, 且O1A = 20cm,O2C = 40cm,若杆O1A以角速度ω=3 rad/s匀速转动,则杆CD上任意点M速度及加速度的大小为: A. 60 cm/s; 180 cm/s2B. 120 cm/s;360 cm/s2C. 90 cm/s;270 cm/s2D. 120 cm/s;150 cm/s2
曲柄机构在其连杆AB的中点C与CD杆铰接,而CD杆又与DF杆铰接,DE杆可绕E点转动。曲柄OA以角速度ω= 8rad/s绕O点逆时针向转动。且OA = 25cm,DE=100cm。在图示瞬时,O、A、B三点共在一水平线上,B、E两点在同一铅直线上,∠CDE=90°,则此时DE杆角速度ωDE的大小和方向为:
半径R=10cm的鼓轮,由挂在其上的重物带动而绕O轴转动,如图所示。重物的运动方程为x= 100t2(x以m计,t以s计)。则鼓轮的角加速度α的大小和方向是:A.α=2000rad/s2,顺时针向B. α==2000rad/s2,逆时针向C.α=200rad/s2,顺时针向D. α==200rad/s2,逆时针向
I、Ⅱ类电能计量装置准确度最低要求为有功电能表( ),无功电能表( ), 电压互感器( ),电流互感器( ).A. 0. 2S 或 0. 2 级,2.0 级,0.2 级,0. 2S 或 0. 2 级;B. 0. 5S 或 0. 5 级,2.0 级,0.2 级,0. 2S 或 0. 2 级; C 0. 5S 或 0.5 级,2.0 级,0.5 级,0. 5S 或 0. 5 级; D. 0. 5S 或 0. 5 级,1.0 级,0.2 级,0. 2S 或 0. 2 级。
铰链四杆机构ABCD,如果以BC为机架(静件),当机构为双曲柄机构时,各杆的长度可为()。A、AB=130 BC=150 CD=175 AD=200B、AB=150 BC=130 CD=165 AD=200C、AB=175 BC=130 CD=185 AD=200D、AB=200 BC=150 CD=165 AD=130
多选题两条通电直导线互相平行,且相隔一段距离,其中AB固定,CD可以自由转动,当通入如图的稳恒电流时,CD导线将( ).A顺时针转动,同时靠近ABB逆时针转动,同时远离ABC远离AB平动D靠近AB平动
单选题有以下程序(程序中库函数islower(ch)用以判断ch中的字符是否为小写字母):#include #include void fun(char *p){ int i=0; while(p[i]) { if(p[i]==' 'islower(p[i-1]))p[i-1]=p[i-1]-'a'+'A'; i++; }}main(){ char s1[100]=ab cd EFG!; fun(s1); printf(%s,s1);}程序运行后的输出结果是( )。Aab cd EFG!BAb Cd EFg!CaB cD EFG!Dab cd EFg!