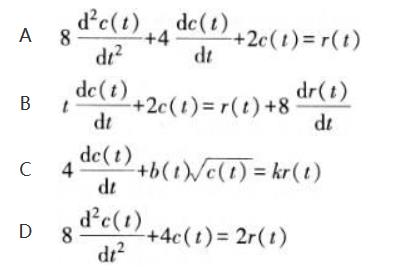
下列描述系统的微分方程中,r(t)为输入变量,c(t)为输出变量,方程中为非线性时变系统的是()。
下列描述系统的微分方程中,r(t)为输入变量,c(t)为输出变量,方程中为非线性时变系统的是()。
参考解析
解析:若线性微分方程的系数是时间的函数,则这种系统称为时变系统,这种系统的响应曲线不仅取决于输入信号的形状和系统的特性,而且和输入信号施加的时刻有关。中公式中的各项系数有随时间变化的项时为时变系统。非线性控制系统不能应用叠加原理,如方程中含有变量及其导数的高次幂或乘积项。本题中A选项中方程是线性常微分方程,系统是线性定常系统。B选项方程中,只有输出一阶导数的系数是时间函数t,系统是线性时变系统。C选项方程中,有输出变量c(t)的开平方项,有系数是时间函数b(t),系统是非线性时变系统。D选项方程为线性定常方程,系统是线性定常系统。
相关考题:
不属于线性系统与非线性系统的根本区别的是()。 A、线性系统微分方程的系数为常数,而非线性系统微分方程的系数为时变函数B、线性系统只有一个外加输入,而非线性系统有多个外加输入C、线性系统满足迭加原理,非线性系统不满足迭加原理D、线性系统在实际系统中普遍存在,而非线性系统在实际中存在较少
线性系统与非线性系统的根本区别在于() A、线性系统微分方程的系数为常数,而非线性系统微分方程的系数为时变函数B、线性系统只有一个外加输入,而非线性系统有多个外加输入C、线性系统满足迭加原理,非线性系统不满足迭加原理D、线性系统在实际系统中普遍存在,而非线性系统在实际中存在较少
哪些不是线性系统与非线性系统的根本区别()A.线性系统微分方程的系数为常数,而非线性系统微分方程的系数为时变函数B.线性系统只有一个外加输入,而非线性系统有多个外加输入C.线性系统满足迭加原理,非线性系统不满足迭加原理D.线性系统在实际系统中普遍存在,而非线性系统在实际中存在较少
关于传递函数,下列说法正确的有 ( ) A 它是输出信号与输入信号之比;B 它是以复变数s 为自变量的有理真分式;C 它不仅与系统的结构和参数有关,还与输入作用的形式有关;D 它可以有系统的微分方程转换得到;E 它是系统动态特性的内部描述。
线性系统环节的微分方程的建立步骤包括: ( 1 )确定输入、输出变量; ( 2 )根据遵循的物理或化学定律,定义(),列写(); ( 3 )消去(),得到输入与输出变量之间的微分方程; ( 4 )整理成()的微分方程。
多选题非线性控制系统特点有()A系统只能用非线性微分方程来描述B系统可以用叠加原理C系统中具有非线性性质的环节D多输入/多输出E系统不可以用叠加原理