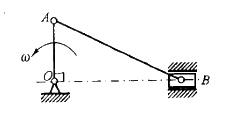
图示曲柄连杆机构中,OA=r,AB=2r,OA、AB及滑块B质量均为m,曲柄以ω的角速度绕O轴转动,则此时系统的动能为:
图示曲柄连杆机构中,OA=r,AB=2r,OA、AB及滑块B质量均为m,曲柄以ω的角速度绕O轴转动,则此时系统的动能为:

参考解析
解析:提示:杆AB瞬时平移,杆OA做定轴转动,滑块B为质点,分别根据动能的定义求解。
相关考题:
曲柄机构在其连杆AB的中点C与CD杆铰接,而CD杆又与DF杆铰接,DE杆可绕E点转动。曲柄OA以角速度ω= 8rad/s绕O点逆时针向转动。且OA = 25cm,DE=100cm。在图示瞬时,O、A、B三点共在一水平线上,B、E两点在同一铅直线上,∠CDE=90°,则此时DE杆角速度ωDE的大小和方向为:
如图所示,曲柄OA长R,以匀角速度ω绕O轴转动,均质圆轮B在水平面上做纯滚动,其质量为m,半径为r。在图示瞬时,OA杆铅直。圆轮B对接触点C的动量矩为( )mRrω。A.0.5B.1.0C.1.5D.2.0
圆盘某瞬时以角速度ω,角加速度α绕O轴转动,其上A、B两点的加速度分别为aA和aB,与半径的夹角分别为θ和φ。若OA=R,OB=R/2,则aA与aB,θ与φ的关系分别为:A.aA=aB,θ=φB. aA=aB,θ=2φC. aA=2aB,θ=φD. aA=2aB,θ=2φ
单选题质量为2m,半径为R的偏心圆板可绕通过中心O的轴转动,偏心距OC= 。在OC连线上的A点固结一质量为m的质点,OA=R如图示。当板以角速度w绕轴O转动时,系统动量K的大小为()。(注:C为圆板的质心)。A K=0B K=mRwC K=mRwD K=2mRw