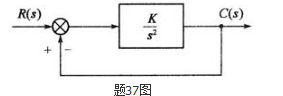
如题37图所示闭环系统的根轨迹应为( )。A. 整个负实轴B. 整个虚轴C. 在虚轴左面平行于虚轴的直线D. 实轴的某一段
如题37图所示闭环系统的根轨迹应为( )。
A. 整个负实轴
B. 整个虚轴
C. 在虚轴左面平行于虚轴的直线
D. 实轴的某一段
B. 整个虚轴
C. 在虚轴左面平行于虚轴的直线
D. 实轴的某一段
参考解析
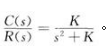
解析:根据图求得闭环系统的传递函数为:
根据闭环传递函数的分母等于零,求得其闭环极点为:
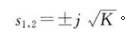
当K从零变到无穷大时,闭环极点的运动轨迹及根轨迹为整个虚轴。
根据闭环传递函数的分母等于零,求得其闭环极点为:
当K从零变到无穷大时,闭环极点的运动轨迹及根轨迹为整个虚轴。
相关考题:
下面有关对根轨迹的描述,说法正确的是()。A、根轨迹是一种图解方法B、根轨迹避免了求解高阶系统特征方程的困难C、根轨迹可以直观看出系统中某些参数的变化对控制系统闭环特征根分布影响的趋势D、根轨迹在工程上得到了广泛的应用
以下关于控制系统根轨迹法描述正确的是:()A、根轨迹法是求解闭环系统特征方程根的一种图式法B、在已知系统开环零、极点在s平面分布的情况下,绘制系统闭环极点在s平面随某一参数变化时的运动轨迹C、绘制根轨迹时,凡是满足幅值条件的点都在根轨迹上D、根轨迹起始于系统开环极点终止于系统开环零点
判断题绘制根轨迹时,我们通常是从Kg=0时的闭环极点画起,即开环极点是闭环根轨迹曲线的起点。起点数n就是根轨迹曲线的条数。A对B错