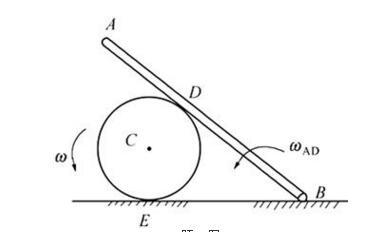
如图,半径为R的圆轮以匀角速度作纯滚动,带动AB杆绕B作定轴转动,D是轮与杆的接触点,如图所示。若取轮心C为动点,杆BA为动坐标系,则动点的牵连速度为( )。
如图,半径为R的圆轮以匀角速度作纯滚动,带动AB杆绕B作定轴转动,D是轮与杆的接触点,如图所示。若取轮心C为动点,杆BA为动坐标系,则动点的牵连速度为( )。

参考解析
解析:
相关考题:
如图所示,曲柄OA长R,以匀角速度ω绕O轴转动,均质圆轮B在水平面上做纯滚动,其质量为m,半径为r。在图示瞬时,OA杆铅直。圆轮B对接触点C的动量矩为( )mRrω。A.0.5B.1.0C.1.5D.2.0
图示凸轮机构,凸轮以等角速度ω绕通过O点且垂直于图示平面的轴转动,从而推动杆AB运动。已知偏心圆弧凸轮的偏心距OC=e,凸轮的半径为r,动系固结在凸轮上,静系固结在地球上,则在图示位置()杆AB上的A点牵连速度的大小等于( )。
半径为R、质量为m的均质圆轮沿斜面作纯滚动如图4-75所示。已知轮心C的速度为V、加速度为a,则该轮的动能为( )。 A. 1/2mv2 B. 3/2mv2 C. 3/4mv2 D. 1/4mv2
圆轮沿直线轨道作纯滚动,只要轮心作匀速运动,则轮缘上任意一点的加速度的方向均指向轮心。