如图1,已知A(100m,100m)、B(200m,200m),方位角α0=45°。测量A点到P的水平距离D=38m,观测水平角β=52°。由极坐标法计算界址点P的坐标,其结果是( )。A.(126.87m,126.87m)B.(123.40m,129.94m)C.(95.37m,137.73m)D.(195.37m,237.72m)
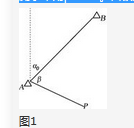
如图1,已知A(100m,100m)、B(200m,200m),方位角α0=45°。测量A点到P的水平距离D=38m,观测水平角β=52°。由极坐标法计算界址点P的坐标,其结果是( )。
A.(126.87m,126.87m)
B.(123.40m,129.94m)
C.(95.37m,137.73m)
D.(195.37m,237.72m)
B.(123.40m,129.94m)
C.(95.37m,137.73m)
D.(195.37m,237.72m)
参考解析
解析:根据界址点坐标的计算公式计算如下:
XP=XA+D·cos(α0+β)=95.37m;YP=YA+D·sin(αo+β)=137.73m。
XP=XA+D·cos(α0+β)=95.37m;YP=YA+D·sin(αo+β)=137.73m。
相关考题:
已知A点坐标XA=100m,YA=200m;B点坐标XB=200m,YB=100m。试反算A、B两点之间的水平距离DAB及其坐标方位角αAB。()A、DAB=70.71m,αAB=135°B、DAB=141.4m,αAB=315°C、DAB=120.71m,αAB=235°D、DAB=150.71m,αAB=335°
如图3-1,已知A(100m,100m)、B(200m,200m),方位角α0=45°。测量A点到P的水平距离D=38m,观测水平角β=52°。由极坐标法计算界址点P的坐标,其结果是( )。A.(126.87m,126.87m)B.(123.40m,129.94m)C.(95.37m,137.73m)D.(195.37m,237.72m)
如图3-2所示,A、B、P1三点在一条直线上,A、B两点的坐标分别为(10m,20m)、(20m,30m),实地利用测距仪或钢尺丈量A点到P1点的距离D1为50m,A点到B点的距离为100m。则由截距法可得P1点坐标为( )。A.(10m,15m)B.(15m,25m)C.(20m,30m)D.(25m,35m)
A、B、P1三点在一条直线上,A、B两点的坐标分别为(10m,20m)、(20m,30m),实地利用测距仪或钢尺丈量A点到P1点的距离D为50m,A点到B点的距离为100m。则由截距法可得P1点坐标为()。A、(10m,15m)B、(15m,25m)C、(20m,30m)D、(25m,35m)
单选题在两已知点分别对待测点观测水平角,以此计算待测点坐标的方法是()。A前方交会法B后方交会法C极坐标法D直角坐标法