在图4-52所示四连杆机构中,杆CA的角速度ω1与杆DB的角速度ω2的关系为( )。A. ω2 =0 B. ω2 1 C. ω12 D. ω1=ω2
在图4-52所示四连杆机构中,杆CA的角速度ω1与杆DB的角速度ω2的关系为( )。
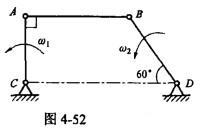
A. ω2 =0 B. ω2 1 C. ω12 D. ω1=ω2
A. ω2 =0 B. ω2 1 C. ω12 D. ω1=ω2
参考解析
解析:提示:对杆AB应用速度投影定理,得到A、B两点速度的关系:再由ω1=vA/AC,ω2=vB/BD得到ω1和ω2两个角速度之间的关系。
相关考题:
平面四连杆机构ABCD如图所示,如杆AB以等角速度ω=1rad/s绕A轴顺时针向转动,则CD杆角速度ωCD的大小和方向为( )。A.ωC.D.=005rA.D./s,逆时针向B.ωC.D.=05rA.D./s,顺时针向C.ωC.D.=025rA.D./s,顺时针向D.ωC.D.=025rA.D./s,逆时针向
杆OA=1,绕定轴O以角速度ω转动,同时通过A端推动滑块B沿轴x运动(图4-49)。设分析运动的时间内杆与滑块并不脱离,则滑块的速度vB的大小用杆的转角φ与角速度ω表示为( )。A. vB=lωsinφ B. vB=lωcosφC. vB=lωcos2φD. vB=lωsin2φ
在横侧操纵中,驾操纵杆左右活动的每一个位置,都对应着一个()A、滚转角速度B、坡度C、旋转角速度