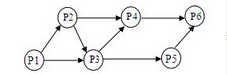
进程Pl、P2、P3、P4、P5和P6的前趋图如下图所示:若用PV操作控制这6个进程的同步与互斥的程序如下,那么程序中的空①和空②处应分别为( );空③和空④处应分别为(请作答此空);空⑤和空⑥处应分别为( )。A.V (S3)和V (S5) V (S6)B.P (S3)和V (S5) V (S6)C.V (S3)和P (S5) P (S6)D.P (S3)和P (S5) P (S6)
进程Pl、P2、P3、P4、P5和P6的前趋图如下图所示:
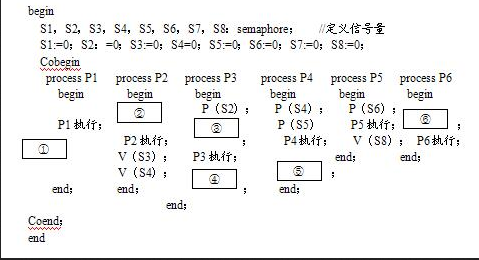
若用PV操作控制这6个进程的同步与互斥的程序如下,那么程序中的空①和空②处应分别为( );空③和空④处应分别为(请作答此空);空⑤和空⑥处应分别为( )。
若用PV操作控制这6个进程的同步与互斥的程序如下,那么程序中的空①和空②处应分别为( );空③和空④处应分别为(请作答此空);空⑤和空⑥处应分别为( )。
A.V (S3)和V (S5) V (S6)
B.P (S3)和V (S5) V (S6)
C.V (S3)和P (S5) P (S6)
D.P (S3)和P (S5) P (S6)
B.P (S3)和V (S5) V (S6)
C.V (S3)和P (S5) P (S6)
D.P (S3)和P (S5) P (S6)
参考解析
解析:图中有八条箭线,因此,需要设置八个信号量。按照从小到大的顺序分别是:P1→P2对应S1,P1→P3对应S2,P2→P3对应S3,P2→P3对应S3,P2→P4对应S4,P3→P4对应S5,P3→P5对应S6,P4→P6对应S7,P5→P6对应S8。每个进程开始的时候执行P操作(P1没有P操作,只有V操作),结束的时候执行V操作。例如,P2开始的时候执行P(S1)的操作,结束时执行V(S3)和V(S4)的操作,P3开始的时候执行P(S2)P(S3)的操作,结束时执行V(S5)和V(S6)的操作,其他同理。
相关考题:
假设系统中有三类互斥资源R1,R2和R3,可用资源数分别为9,8和5。在T0时刻系统中有P1,P2,P3,P4和P5五个进程,这些进程对资源的最大需求量和已分配资源数如表3-2所示。如果进程按______ 序列执行,那么系统状态是安全的。A.P1→P2→P4→P5→P3B.P2→P1→P4→P5→P3C.P2→P4→P5→P1→P3D.P4→P2→P5→P1→P3
假设系统中有三类互斥资源R1、R2和R3,可用资源数分别为9、8和5。在T0时刻系统中有P1、P2、P3、P4和P5五个进程,这些进程对资源的最大需求量和已分配资源数如下表所示。如果进程按(27)序列执行,那么系统状态是安全的。A.P1→P2→P4→P5→P3B.P2→P1→P4→P5→P3C.P2→P4→P5→P1→P3D.P4→P2→P4→P1→P3
● 假设系统中有三类互斥资源 R1、R2 和 R3,可用资源数分别为 8、7 和 4。在T0 时刻系统中有P1、P2、P3、P4 和P5 五个进程,这些进程对资源的最大需求量和已分配资 源数如下表所示。在T0 时刻系统剩余的可用资源数分别为 (24 )。如果进程按 (25 )序 列执行,那么系统状态是安全的。24 )A. 0、1 和 0B. 0、1 和 1C. 1、1 和 0D. 1、1 和 1(25 )A. P1→P2→P4→P5→P3B. P2→P1→P4→P5→P3C. P4→P2→P1→P5→P3D. P4→P2→P5→P1→P3
有5个进程P1,P2,P3,P4,P5,它们几乎同时进入就绪队列,它们的优先数和需要的处理器时间如下表所示。假设优先数小的优先级高,忽略进行调度等所花费的时间。采用“不可剥夺优先数”调度算法,进程执行的次序是________。A.P2、P1、P5、P3、P4B.P2、P4、P5、P3、P1C.P4、P1、P3、P5、P2D.P4、P3、P1、P5、P2
进程P1、P2、P3、P4、P5的前趋关系图如下所示:若用PV操作控制这5个进程的同步与互斥,程序如下: 程序中空a和空b处应分别为(48),空c和空d处应分别为(49);空e和空f处应分别为(50)。A.AB.BC.CD.D
进程P1、P2、P3、P4和P5的前趋图如下所示:若用PV操作控制进程P1、P2、P3、P4和P5并发执行的过程,需要设置5个信号量S1、S2、S3、S4和S5,且信号量S1~S5的初值都等于零。如下的进程执行图中a和b处应分别填写 ( ) ;c和d处应分别填写 ( ) ;e和f处应分别填写 (请作答此空) 。A.P(S4)和V(S5)B.V(S5)和P(S4)C.V(S4)和P(S5)D.V(S4)和V(S5)
进程P1、P2、P3、P4和P5的前趋图如下所示:若用PV操作控制进程P1、P2、P3、P4和P5并发执行的过程,需要设置5个信号量S1、S2、S3、S4和S5,且信号量S1~S5的初值都等于零。如下的进程执行图中a和b处应分别填写 (请作答此空) ;c和d处应分别填写 ( ) ;e和f处应分别填写 ( ) 。A.V(S1)和P(S2)V(S3)B.P(S1)和V(S2)V(S3)C.V(S1)和V(S2)V(S3) D.P(S1)和P(S2)V(S3)
进程P1、P2、P3、P4和P5的前趋图如下所示:若用PV操作控制进程P1、P2、P3、P4和P5并发执行的过程,则需要设置5个信号量S1、S2、S3、S4和S5,且信号量S1~S5的初值都等于零。下图中a、b和c处应分别填写( );d和e处应分别填写(请作答此空),f和g处应分别填写( )。A. V(S2)和P(S4)B. P(S2)和V(S4)C. P(S2)和P(S4)D. V(S2)和V(S4)
进程P1、P2、P3、P4和P5的前趋图如下图所示:若用PV操作控制进程P1、P2、P3、P4和P5并发执行的过程,则需要设置5个信号量S1.S2.S3.S4和S5,且信号量S1~S5的初值都等于零。下图中a和b处应分别填写( );c和d处应分别填写(请作答此空),e和f处应分别填写( )。A. P(S2)和P(S4)B. P(S2)和V(S4)C. V(S2)和P(S4)D. V(S2)和V(S4)
假设系统中有三类互斥资源R1、R2和R3,可用资源数分别为9、8和5。在To时刻系统中有P1、P2、P3、P4和P5五个进程,这些进程对资源的最大需求量和已分配资源数如下表所示。如果进程按( )序列执行,那么系统状态是安全的。A.P1→P2→P4→P5→P3B.P2→P1→P4→P5→P3C.P2→P4→P5→P1→P3D.P4→P2→P4→P1→P3
进程P1、P2、P3、P4和P5的前趋图如下图所示:若用PV操作控制进程P1、P2、P3、P4和P5并发执行的过程,则需要设置5个信号量S1.S2.S3.S4和S5,且信号量S1~S5的初值都等于零。下图中a和b处应分别填写( );c和d处应分别填写( ),e和f处应分别填写(请作答此空)。
进程P1、P2、P3、P4和P5的前趋图如下图所示:若用PV操作控制进程P1、P2、P3、P4和P5并发执行的过程,则需要设置5个信号量S1.S2.S3.S4和S5,且信号量S1~S5的初值都等于零。下图中a和b处应分别填写(请作答此空);c和d处应分别填写( ),e和f处应分别填写( )。A. V(S1)、P(S2)和V(S3)B. P(S1)、V(S2)和V(S3)C. V(S1)、V(S2)和V(S3)D. P(S1)、P(S2)和V(S3)
进程Pl、P2、P3、P4、P5和P6的前趋图如下图所示:若用PV操作控制这6个进程的同步与互斥的程序如下,那么程序中的空①和空②处应分别为(23);空③和空④处应分别为(24);空⑤和空⑥处应分别为(25)。A.V (S3)和V (S5) V (S6)B.P (S3)和V (S5) V (S6)C.V (S3)和P (S5) P (S6)D.P (S3)和P (S5) P (S6)(22)
6进程P1、P2、P3、P4和P5的前趋图如下所示:若用PV操作控制进程P1、P2、P3、P4和P5并发执行的过程,则需要设置5个信号量S1、S2、S3、S4、S5,且信号量S1~S5的初值都等于零。下图中c和d分别应填写( )。A.P(S2)和P(S4) B.P(S2)和V(S4)C.V(S2)和P(S4)D.V(S2)和V(S4)
6进程P1、P2、P3、P4和P5的前趋图如下所示:若用PV操作控制进程P1、P2、P3、P4和P5并发执行的过程,则需要设置5个信号量S1、S2、S3、S4、S5,且信号量S1~S5的初值都等于零。下图中a和b分别应填写( )。A.V(S1)P(S2)和V(S3)B.P(S1)V(S2)和V(S3)C.V(S1)V(S2)和V(S3)D.P(S1)P(S2)和V(S3)
假设系统中有三类互斥资源R1、R2和R3,可用资源数分别为10、5和3。在T0时刻系统中有P1、P2、P3、P4和P5五个进程,这些进程对资源的最大需求量和已分配资源数如下表所示,此时系统剩余的可用资源数分别为( )。如果进程按(请作答此空)序列执行,那么系统状态是安全的。A.P1→P2→P4→P5→P3B.P5→P2→P4→P3→P1C.P4→P2→P1→P5→P3D.P5→P1→P4→P2→P3
进程Pl、P2、P3、P4、P5和P6的前趋图如下图所示:若用PV操作控制这5个进程的同步与互斥的程序如下,那么程序中的空①和空②处应分别为(请作答此空 );空③和空④处应分别为( );空⑤和空⑥处应分别为( )。若用PV操作控制这6个进程的同步与互斥的程序如下,那么程序中的空①和空②处应分别为(23);空③和空④处应分别为(24);空⑤和空⑥处应分别为(25)。A.V (S1) V (S2)和P (S2)B.P (S1) P (S2)和V (S2)C.V (S1) V (S2)和P (S1)D.P (S1) P (S2)和V (S1)
进程P1、P2、P3、P4、P5和P6的前趋图如下所示:若用PV操作控制这6个进程的同步与互斥的程序如下,那么程序中的空①和空②处应分别为(48)A.V(S1)和P(S2)B.P(S1)和V(S2)C.V(S1)和V(S2)D.V(S2)和P(S1)
进程P1、P2、P3、P4、P5和P6的前趋图如下所示:若用PV操作控制这6个进程的同步与互斥的程序如下,空f和空g处应分别为(48)。A.V(S5)和V(S7)B.P(5)和P(S7)C.P(S5)和V(S7)D.V(S5)和P(S7)
前趋图是一个有向无环图,记为:→=(P i ,P j )|P i 完成时间先于 P j 开始时间}。假设系统中进程 P=(P 1 ,P2, P3, P 4 , P 5 ,P 6 , P 7 ,P 8 }且进程的前趋图如下:那么,该前驱图可记为()。A.→={(P1,P2),(P1,P3),(P1,P4 ),(P2,P5),(P3,P2),(P3,P4),(P3,P6),(P4,P7),(P5,P8),(P5,P6),(P7,P8)}B.→={(P1,P2),(P1,P3),(P1,P4),(P2,P5),(P3,P2),(P3,P4),(P3,P6),(P4,P7),(P5,P8),(P6,P8),(P7,P8)}C.→={(P1,P2),(P1,P3),(P1,P4),(P2,P5),(P3,P2),(P3,P4),(P3,P5),(P4,P6),(P4,P7),(P6,P8),(P7,P8)}D.→={(P1,P2),(P1,P3),(P1,P4),(P2,P5),(P3,P2),(P3,P4),(P3,P5),(P4,P6),(P4,P7),(P7,P8),(P6,P8)}
前趋图是一个有效无环图,记为→={pi,pj,pi完成时间先于pj开始时间}。假设系统中进P={p1,p2,p3,p4,p5,p6,p7,p8},且进程的前趋图如下。那么该前驱图可记为(请作答此空)图中( )A.→={(P1,P2),(P1,P3),(P1,P4),(P2,P5),(P3,P2),(P3,P4),(P3,P6),(P4,P7),(P5,P8)B.→={(P1,P2),(P1,P4),(P2,P3),(P2,P5),(P3,P4),(P3,P6),(P4,P7),(P5,P6),(P6,P8),(p7,p6)}C.→={(P1,P2),(P1,P4),(P2,P5),(P3,P2),(P3,P4),(P3,P6),(P4,P6),(P4,P7),(P6,P8),(p7,p8)}D.→={(P1,P2),(P1,P3),(P2,P4),(P2,P5),(P3,P2),(P3,P4),(P3,P5),(P4,P7),(P6,P8),(p7,p8)}
进程P1、P2、P3、P4、P5和P6的前趋图如下所示:若用PV操作控制这6个进程的同步与互斥的程序如下,空③和空④处应分别为(49)。A.V(S4)V(S5)和P(S3)B.P(S4)P(S5)和V(S3)C.V(S3)V(S4)和V(S5)D.P(S3)V(S4)和P(S3)
进程P1、P2、P3、P4、P5和P6的前趋图如下所示:若用PV操作控制这6个进程的同步与互斥的程序如下,那么程序中的空a、空b和空c处应分别为(46)。A.V(S3)、P(S2)和V(S4)V(S5)B.P(S3)、P(S2)和V(S4)V(S5)C.V(S2)、P(S3)和P(S4)P(S3)D.V(S2)、V(S3)和P(S3)P(S4)
进程P1、P2、P3、P4、P5和P6的前趋图如下所示:若用PV操作控制这6个进程的同步与互斥的程序如下,空d和空e处应分别为(47)。A.V(S3)V(S4)和V(S6)B.P(S3)P(S4)和V(S6)C.P(S3)V(S4)和V(S6)D.P(S3)V(S4)和P(S6)
前趋图是一个有效无环图,记为-={pi,pj,pi完成时间先于pj开始时间}。假设系统中进P={p1,p2,p3,p4,p5,p6,p7,p8},且进程的前趋图如下。那么该前驱图可记为( )图中(请作答此空)A.存在着十个前驱关系。p1为初始节点。p2p4为终止节点。B.存在着两个前驱关系。p6为初始节点,p2p4为终止节点。C.存在着九个前驱关系。p6为初始节点,p8为终止节点。D.存在着十个前驱关系。p6为初始节点,p8为终止节点。
前趋图是一个有效无环图,记为-={pi,pj,pi完成时间先于pj开始时间}。假设系统中进P={p1,p2,p3,p4,p5,p6,p7,p8},且进程的前趋图如下。那么该前驱图可记为(请作答此空)图中( )A.-={(P1,P2),(P1,P3),(P1,P4)(P2,P5),(P3,P2),(P3,P4),(P3,P6),(P4,P7),(P5,P6)B.-={(P1,P2),(P1,P4),(P2,P3)(P2,P5),(P3,P4),(P3,P6),(P4,P7),(P5,P6),(P6,P8)(p7,p6)}C.-={(P1,P2),(P1,P4),(P2,P5)(P3,P2),(P3,P4),(P3,P6),(P4,P6),(P4,P7),(P6,P8)(p7,p8)}D.-={(P1,P2),(P1,P3),(P2,P4)(P2,P5),(P3,P2),(P3,P4),(P3,P5),(P4,P7),(P6,P8)(p7,p8)}
前趋图(Precedence Graph) 是一个有向无环图,记为:→={(Pi,Pj )|Pi must complete before Pj may strat}。假设系统中进程P={P1,P2,P3,P4,P5,P6,P7,P8},且进程的前驱图如下:那么前驱图可记为:( )A. →={(P2,P1),(P3,P1),(P4,P1),(P6,P4),(P7,P5),(P7,P6),(P8,P7)}B. →={(P1,P2),(P1,P3),(P1,P4),(P2,P5),(P5,P7),(P6,P7),(P7,P8)}C. →={(P1,P2),(P1,P3),(P1,P4),(P2,P5),(P3,P5),(P4,P6),(P5,P7),(P6,P7),(P7,P8)}D. →={(P2, P1), (P3,P1),(P4,P1),(P5,P2),(P5,P2),(P5,P3),(P6,P4),(P7,P5), (P7,P6),(P8,P7)}